Hi,
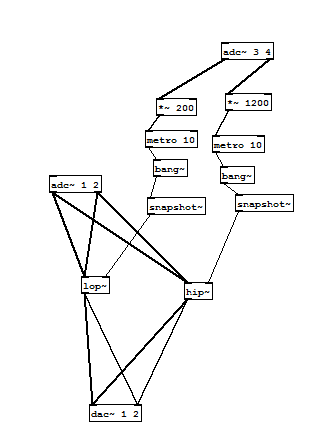
I am new to pd and having difficulty converting signal from output of {adc~} to a control input of {lop~}. Coming out of the adc~ is a signal ranging from 0-1 so I multiplied that by 200 thus my range is 0-200, however at this point it is still a signal not a control. what is the easiest way to convert to a control line using only libpd (cannot use unsig~)?
Thanks,
Brock